// Michelangelo Rail Gantry System - VRChat Udon Prefab
Description
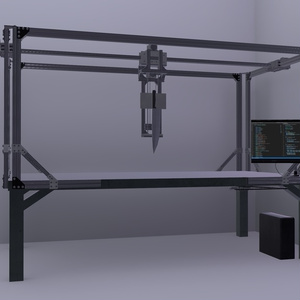
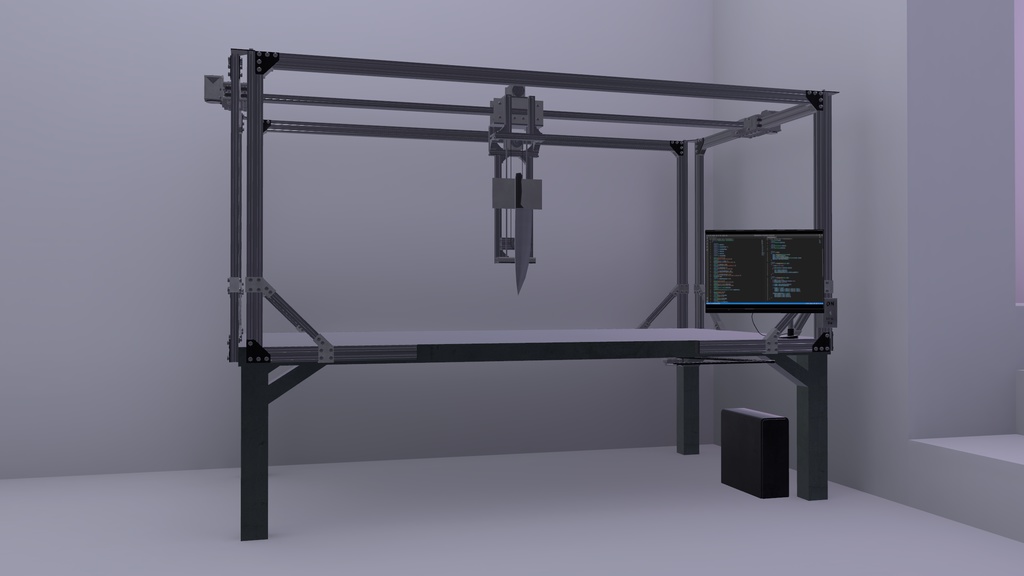
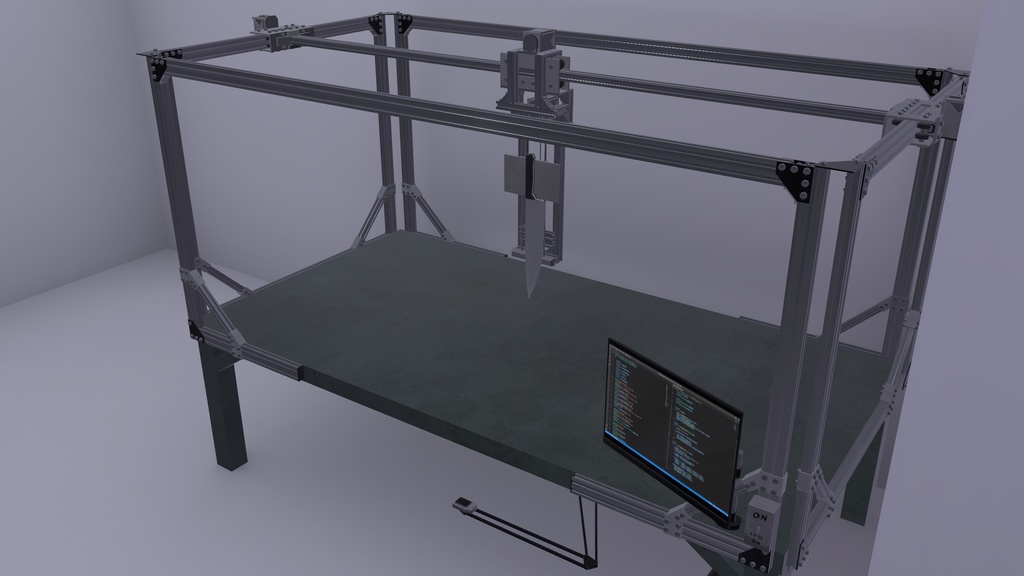
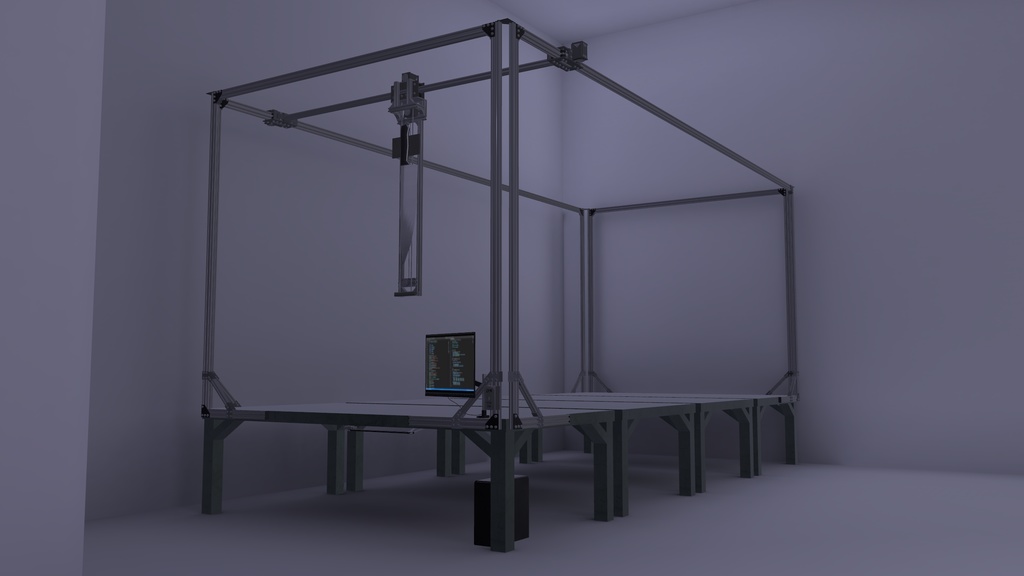
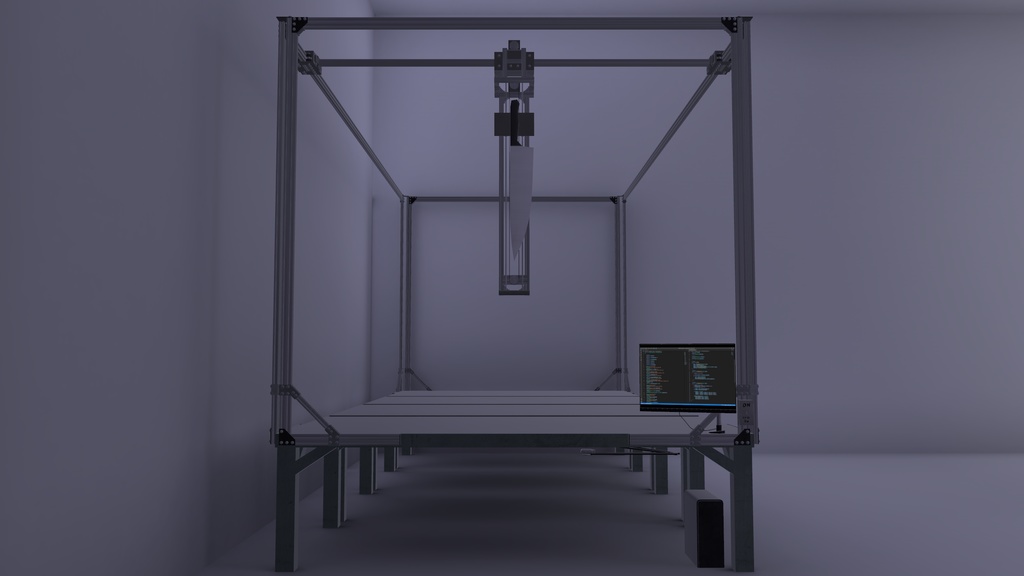
This is a hand-tracking robotic physics-based rail gantry system built withing VRChat! Inspired by Michael Reeves' "Surgery Robot" ( https://www.youtube.com/watch?v=A_BlNA7bBxo ), this system is both fun out of the box, as well as fully customizable, with plenty of different parts to make your own systems as well.
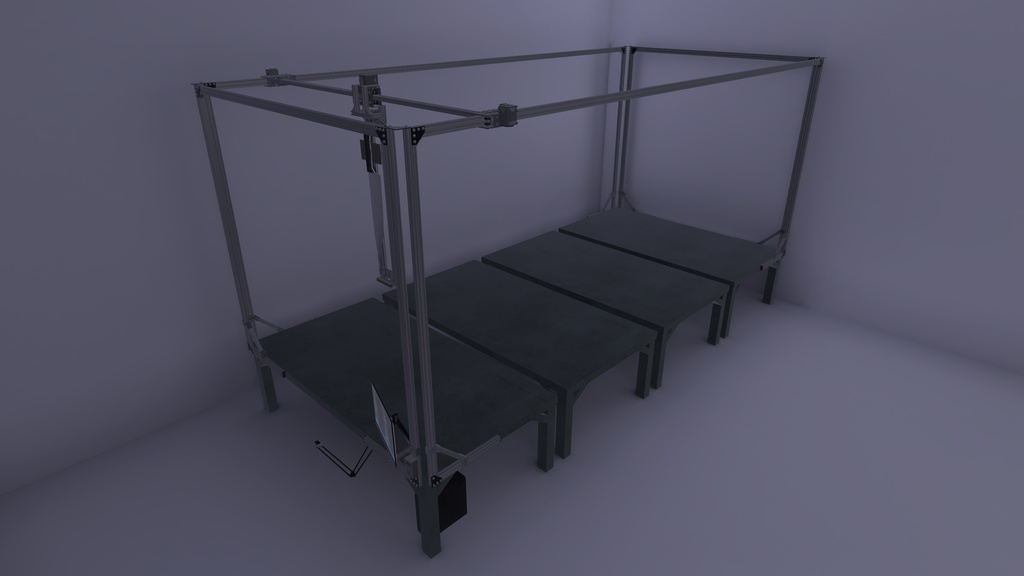
The system dynamically calculates it's own bounds, which is a fancy way of saying that it can be any size you'd like it to be! While this can be a fun prop, it's intention is to act more as a base for more complex systems, such as hand tracking claw games and the likes.
This system is modeled by me based on the real-life parts used in Reeves' video, and is easily the most complex system I've made for VRChat. It will be available both here and on my Patreon.
https://www.patreon.com/Vowgan
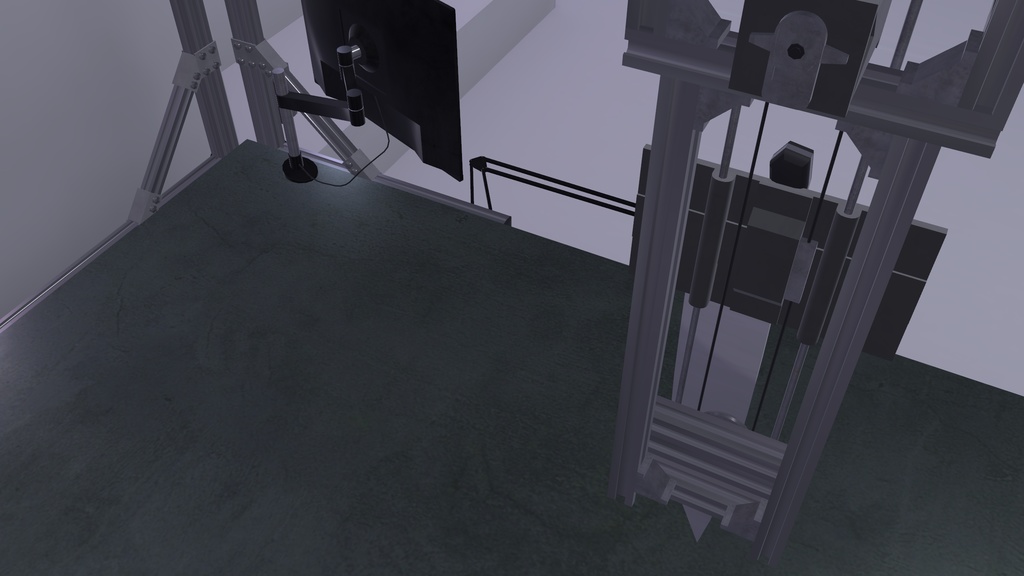
This package requires the Impact system I've also developed, but is included within this system. So, if you'd like a two-in-one, you can pick up my Impact system as part of this one!
Note: This system requires UdonSharp, a tool developed by Merlin for C# coding within Udon. You can find it at this link.
https://github.com/Merlin-san/UdonSharp
For those interested in testing the system out yourself, here is the example scene that comes with the project uploaded to VRChat.
https://vrchat.com/i/fatih-animalwhat-8eaed